La empresa ha culminado el proyecto INSPECT4.0, incorporando robótica avanzada e inteligencia artificial para mejorar significativamente la precisión y eficiencia en la inspección industrial
Por Deyanira Vázquez | Reportera
Alisys acaba de anunciar la finalización del proyecto INSPECT4.0. Se trata de una iniciativa pionera en el desarrollo de tecnologías robóticas de última generación para la inspección y vigilancia en entornos industriales.
«Las tareas de inspección industrial requieren actuar con agilidad sobre diferentes ubicaciones en espacios complejos con diversos obstáculos fijos y móviles. El objetivo es realizar tareas como la toma de medidas, visualización de componentes y detección de defectos en un entorno con un alto grado de incertidumbre», explican desde la compañía.
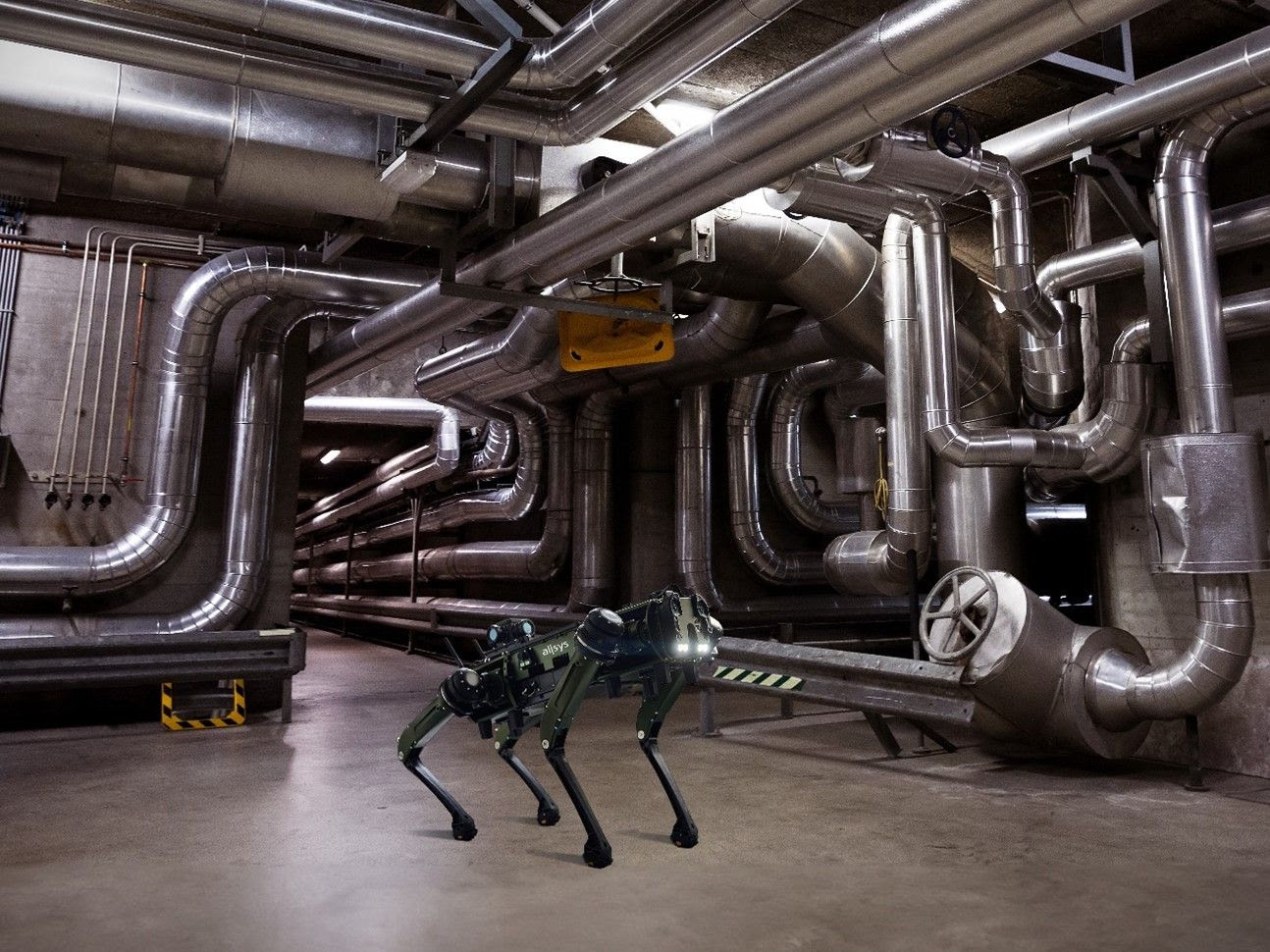
Para ello, se han mejorado las prestaciones de los sistemas basados en robots dinámicos cuadrúpedos, capaces de superar obstáculos y acceder a localizaciones que podrían ser inaccesibles para otros tipos de robots tradicionalmente utilizados en entornos logísticos o fabriles.
Para llevar a cabo las pruebas de concepto y el desarrollo, los ingenieros de robótica de Alisys han trabajado con los cuadrúpedos más avanzados del mundo, como el robot V60 de Ghost Robotics o Spot Explorer y Spot Enterprise de Boston Dynamics, compañías de las que Alisys es partner oficial certificado para España y Portugal.
«Los resultados obtenidos son muy prometedores y han despertado el interés de varias entidades industriales destacadas, dando continuidad al proyecto a través de nuevas iniciativas y casos de uso», concluyen.
La IoT y la IA también entran a formar parte de los avances de robótica
A lo largo del proyecto, se han investigado y validado nuevas capacidades digitales en la inspección y vigilancia automatizadas a través de tecnologías basadas en robótica, inteligencia artificial (IA), realidad aumentada e Internet de las cosas (IoT) entre las que se encuentran la percepción e interacción inteligente con el entorno, la navegación autónoma en entornos dinámicos, la planificación de misiones colaborativas y la teleoperación asistida por tecnologías digitales. –sn–